





|
The idea behind this project was to create a hovercraft incorporating mechanical, electrical and computer components.
Many others have successfully made hovercrafts using either ShopVacs

or leaf blowers to float a platform on a cushion of air.
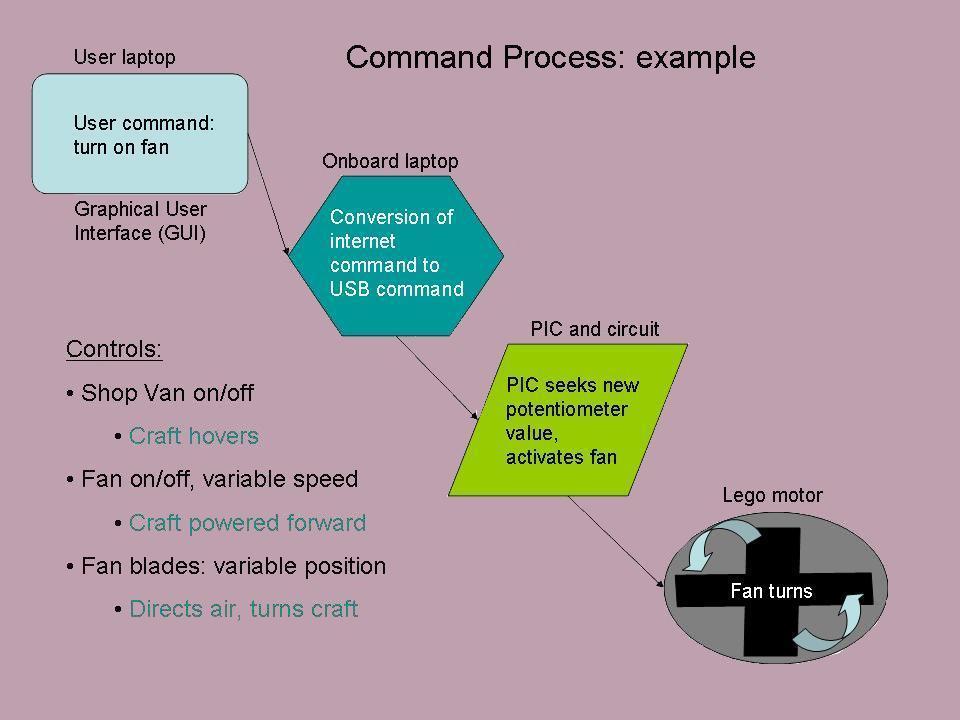
We wanted to expand on that technique by controlling the hovercraft through a PIC and USB control.
A laptop rides on the hovercraft, controlling the PIC, and through a server on that laptop,
a user can control the hovercraft remotely over the internet by simply connecting to the server.
There are three controls on the hovercraft through the circuit, each powered by a Lego motor: power of the ShopVac (which makes the hovercraft hover or not),
power and speed of the fan (which creates air currents to drive the craft forwards), and direction of the airflow (which turns the craft).
Through a simple GUI, the user can manipulate the craft.
The flowchart below describes the integrated control system.
Our process involved more experimentation and less advanced planning, but worked in the end. We spent the first couple of weeks investigating the basic
mechanics of the hovercraft, essentially building a few sketch
models and trying them out with the ShopVac. We also purchased
most of the materials we planned on needing and began exploring their
interactions. Once we had all the materials, we experimented with
different skirt designs, vanes for the directional fan, circuit
design, and code.

By December 6th, the hovercraft was able to lift
and propel itself very slowly, but the switches had to be manually
operated. We then created the Lego switch-controls and integrated the system through circuitry and programming.
|

